Vetores
Os vetores são ferramentas matemáticas que podem representar as grandezas físicas vetoriais. Com eles é possível realizar diversas operações algébricas, tais como soma de vetores na mesma direção e sentido, subtração de vetores na mesma direção e sentido (soma de vetores opostos), soma de vetores perpendiculares, soma de vetores oblíquos, e multiplicação de um vetor por um número real.
Leia também: Qual a diferença entre grandezas vetoriais e grandezas escalares?
Resumo sobre os vetores
- Os vetores são segmentos de reta caracterizados pelo sentido, direção e módulo.
- Os vetores podem ser iguais, opostos, perpendiculares, oblíquos, nulos, unitários e resultantes.
- O resultado das operações com vetores é um vetor resultante.
- Usamos os vetores na representação das grandezas vetoriais estudadas na física e como pontos, retas e planos no espaço na geometria.
- Na decomposição vetorial, é possível descobrir as componentes horizontais e verticais dos vetores.
O que são vetores?
Os vetores são segmentos de reta que se assemelham a setas. Eles são capazes de representar as grandezas físicas vetoriais (aquelas que precisam de orientação e módulo).
Características dos vetores
Os vetores são caracterizados pelo sentido, direção e módulo.
- Sentido: fornece a orientação para direita, esquerda, cima, baixo, norte, sul, leste, oeste e outras orientações do vetor.
- Direção: fornece a orientação horizontal, vertical ou diagonal do vetor.
- Módulo: fornece o tamanho ou intensidade do vetor, podendo ser usado nas operações com vetores.
Quais são os tipos de vetores?
Os vetores podem ser classificados como iguais, opostos, perpendiculares, oblíquos, nulos, unitários e resultantes.
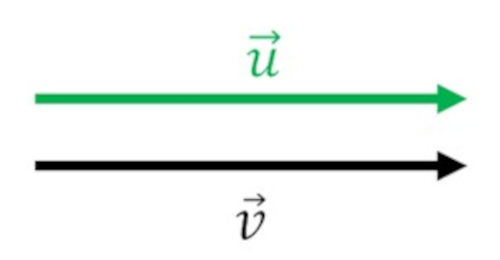
- Vetores iguais: têm as mesmas características de módulo, direção e sentido.
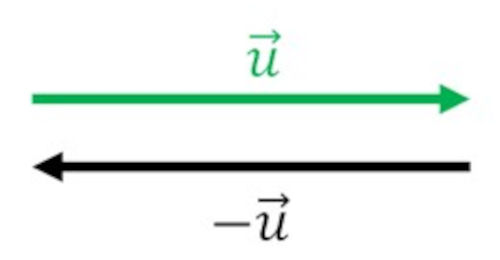
- Vetores opostos: têm mesma direção, mas sentidos diferentes, e são representados por um sinal negativo em seu módulo.
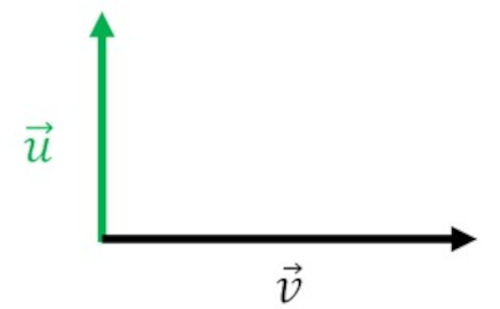
- Vetores perpendiculares: são formados por uma dupla de vetores que fazem um ângulo de 90º entre si.
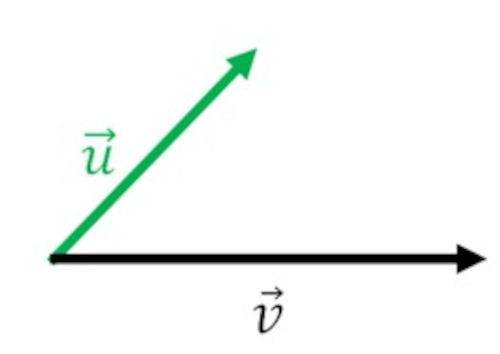
- Vetores oblíquos: são formados por uma dupla de vetores que fazem um ângulo qualquer e diferente de 0°, 90° e 180°.
- Vetores nulos: têm módulo ou tamanho igual a zero, direção indefinida e sentido indefinido, sendo representado por \(\vec{0}\).
- Vetores unitários: têm módulo ou tamanho igual a 1.
- Vetores resultantes: são resultado das operações com vetores.
Operações com vetores
As operações com vetores incluem soma de vetores na mesma direção e sentido, subtração de vetores na mesma direção e sentido (soma de vetores opostos), soma de vetores perpendiculares, soma de vetores oblíquos, e multiplicação de um vetor por um número real.
→ Soma de vetores na mesma direção e no mesmo sentido
Na soma de vetores na mesma direção e sentido, originam-se um vetor resultante, com mesma direção e sentido dos vetores, e um módulo calculado pela adição dos vetores (das suas componentes ou do seu módulo).
\(\vec{R} = \vec{v} + \vec{u}\)
- Exemplo:
Qual o vetor resultante da soma de vetores na mesma direção e sentido e com tamanhos de 2 unidades e de 5 unidades?
Resolução:
\(\vec{R} = \vec{v} + \vec{u}\)
\(\vec{R} = 2 + 5\)
\(\vec{R} = 7\ \text{unidades}\)
→ Subtração de vetores na mesma direção e no mesmo sentido
Tanto na subtração de vetores na mesma direção e no mesmo sentido quanto na soma de vetores opostos, origina-se um vetor resultante com mesma direção dos vetores, mesmo sentido do vetor de maior módulo e módulo calculado pela diferença entre os vetores ou adição dos vetores opostos (das suas componentes ou do seu módulo). Ambos os casos darão o mesmo resultado.
- Substração de vetores na mesma direção e sentido: \(\vec{R} = \vec{v} + \vec{u}\)
- Soma de vetores opostos: \(\vec{R} = \vec{v} + (\vec{-u})\)
- Exemplo:
Qual o vetor resultante da subtração dos vetores de tamanhos de 7 unidades e de 5 unidades?
Resolução:
Substração de vetores na mesma direção e no mesmo sentido:
\(\vec{R} = \vec{v} - \vec{u}\)
\(\vec{R} = 7-5\)
\(\vec{R} = 2\ \text{unidades}\)
→ Soma de vetores perpendiculares
Na soma de vetores perpendiculares, origina-se um vetor resultante com sentido e direção dados pela regra do paralelogramo e módulo calculado pelo teorema de Pitágoras, em que a hipotenusa representa o módulo do vetor resultante e os catetos representam os módulos dos vetores perpendiculares:
\(\text{hipotenusa}^2 = \text{cateto}_1^2 + \text{cateto}_2^2 \)
\(R^2=v^2+u^2 \)
- Exemplo:
Qual o vetor resultante da soma de vetores perpendiculares com tamanhos de três unidades e de quatro unidades?
Resolução:
\(\text{hipotenusa}^2 = \text{cateto}_1^2 + \text{cateto}_2^2 \)
\(R^2=v^2+u^2 \)
\(R^2=3^2+4^2 \)
\(R^2=9 + 16\)
\(R^2=25 \)
\(R= 5\ \text{unidades}\)
→ Soma de vetores oblíquos
Na soma de vetores oblíquos, origina-se um vetor resultante com sentido e direção dados pela regra do paralelogramo e módulo calculado pela lei dos cossenos, em que a hipotenusa representa o módulo do vetor resultante, os catetos representam os módulos dos vetores oblíquos e teta representa o ângulo entre os vetores oblíquos:
\(\text{hipotenusa}^2 = \text{cateto}_1^2 + \text{cateto}_2^2 - 2\cdot \text{cateto}_1 \cdot \text{cateto}_2 \cdot cos \theta\)
\(R^2=v^2+u^2 - 2\cdot v\cdot u\cdot cos\theta\)
- Exemplo:
Qual o vetor resultante da soma de vetores oblíquos com tamanhos de 1 unidade e de 6 unidades e ângulo entre eles de 60º?
Resolução:
\(R^2=v^2+u^2 - 2\cdot v\cdot u\cdot cos\theta\)
\(R^2=1^2+6^2 - 2\cdot 1\cdot 6\cdot cos60º\)
\(R^2=1 +36-6\)
\(R^2=31 \)
\(R\cong 5,57\ \ unidades\)
→ Multiplicação de um vetor por um número real
Na multiplicação de um vetor por um número real, origina-se um vetor resultante com mesma direção do vetor, sentido que depende do produto do vetor pelo número e módulo calculado pelo produto do número real com o vetor (das suas componentes ou do seu módulo), em que n representa o número real.
\(\vec{R} = n \cdot \vec{v} \)
- Exemplo:
Qual o vetor resultante da multiplicação do vetor de tamanho de 10 unidades pelo número real -5?
Resolução:
\(\vec{R} = n \cdot \vec{v} \)
\(\vec{R} = -5 \cdot 10\)
\(\vec{R} = 50 \ unidades\)
Para saber mais sobre operações com vetores, clique aqui.
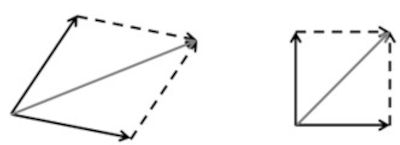
Regra do paralelogramo
A regra do paralelogramo fornece a direção e o sentido do vetor resultante em algumas operações com vetores. Nessa regra, primeiramente, desenha-se a componente dos vetores (setas pontilhadas) formando uma figura geométrica, como um quadrado, retângulo, losango ou paralelogramo, e, por fim, liga-se o ponto entre os vetores originais até o ponto de encontro das suas componentes, gerando uma diagonal que representa o vetor resultante (vetor cinza), conforme descrito na imagem abaixo:
Onde são usados os vetores?
Os vetores são usados para representar grandezas vetoriais estudadas na física; pontos, retas e planos no espaço na geometria; e são elementos dos espaços vetoriais na algébra linear.
Decomposição vetorial
A decomposição vetorial é um método matemático usado para encontrar as componentes (projeções ou sombras) horizontal e vertical de um vetor.
Para realizar a decomposição vetorial, primeiramente deve-se identificar a orientação do vetor, em seguida, desenha-se suas componentes (linhas tracejadas) e, por fim, analisa-se a posição do ângulo, conforme a imagem abaixo:
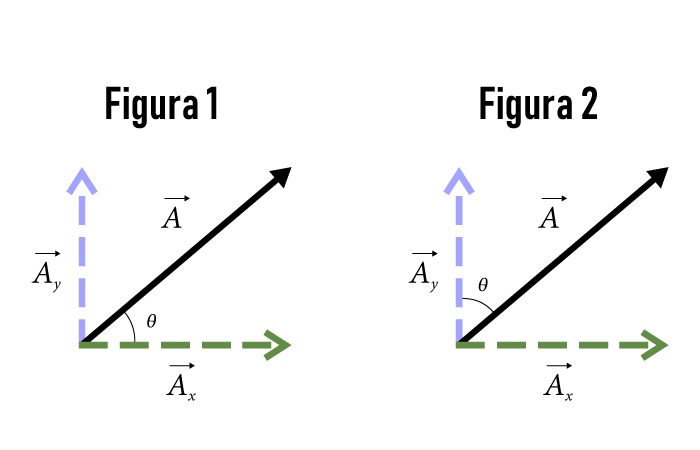
- Ângulo na horizontal (Figura 1): a componente x e a componente y serão calculadas pelas fórmulas:
Ax = A · cosθ
Ay = A · senθ
- Ângulo na vertical (Figura 2): a componente x e a componente y serão calculadas pelas fórmulas:
Ax = A · senθ
Ay = A · cosθ
Para saber mais sobre decomposição vetorial, clique aqui.
Exercícios resolvidos sobre vetores
Questão 1
(UEPG) Quando dizemos que a velocidade de uma bola é de 20 m/s, horizontal e para a direita, estamos definindo a velocidade como uma grandeza:
A) escalar
B) algébrica
C) linear
D) vetorial
E) n.d.a.
Resolução:
Alternativa D.
A velocidade pode ser definida como uma grandeza vetorial, já que precisa de sentido, direção e módulo.
Questão 2
(Enem) A força de atrito é uma força que depende do contato entre corpos. Pode ser definida como uma força de oposição à tendência de deslocamento dos corpos e é gerada devido a irregularidades entre duas superfícies em contato. Na figura, as setas representam forças que atuam no corpo e o ponto ampliado representa as irregularidades que existem entre as duas superfícies.
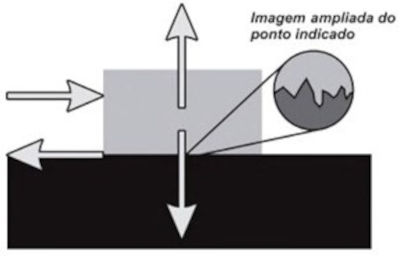
Na figura, os vetores que representam as forças que provocam o deslocamento e o atrito são, respectivamente:
A) ![]()
B) 
C) 
D) 
E) 
Resolução:
Alternativa A.
O vetor que representa a força que provoca o deslocamento está na direção horizontal e no sentido para a direita, já a força que provoca o atrito está na direção horizontal e no sentido para a esquerda.
Fontes
HALLIDAY, David; RESNICK, Robert; WALKER, Jearl. Fundamentos da Física: Mecânica. 8. ed. Rio de Janeiro, RJ: LTC, 2009.
NUSSENZVEIG, Herch Moysés. Curso de física básica: Mecânica (vol. 1). 5 ed. São Paulo: Editora Blucher, 2015.

