Cinemática vetorial
A cinemática vetorial é a parte da cinemática, um dos ramos da mecânica clássica, responsável pelo estudo do movimento dos corpos considerando as características vetoriais (módulo, direção e sentido) das grandezas físicas vetoriais, sem levar em consideração a razão que provocou o seu movimento.
Leia também: Quais são os conceitos básicos da cinemática?
Resumo sobre cinemática vetorial
-
A cinemática vetorial é a parte da cinemática, um dos ramos da mecânica clássica, que analisa de maneira vetorial a posição, a velocidade e a aceleração dos corpos.
-
O deslocamento vetorial é a descrição em notação vetorial da alteração de posição de um corpo.
-
A velocidade vetorial é a descrição em notação vetorial da variação de posição de um corpo em um intervalo de tempo.
-
A aceleração vetorial é a descrição em notação vetorial da variação de velocidade em um intervalo de tempo.
-
A composição de movimentos é uma análise de movimentos que se sucedem ao mesmo tempo e inclusive são observados como um só; contudo, eles ocorrem em diferentes direções e/ou diferentes sentidos.
-
Enquanto na cinemática vetorial levamos em conta o módulo, a direção e o sentido das grandezas vetoriais, na cinemática escalar não levamos em conta essas características vetoriais.
O que é cinemática vetorial?
A cinemática vetorial é a parte da cinemática, um dos ramos da mecânica clássica, responsável pela investigação do movimento dos corpos em termos de vetores. Por isso, faz-se necessário considerar a orientação (sentido e direção) e o módulo grandezas físicas vetoriais, como o deslocamento, a velocidade e a aceleração.
As grandezas físicas escalares, tanto na cinemática vetorial quanto na cinemática escalar, são descritas apenas em termos do seu módulo, não necessitando do formalismo vetorial.
Deslocamento vetorial
O deslocamento vetorial diz respeito à variação de posição realizada por um corpo levando em consideração a sua direção, o seu sentido e o seu módulo; diferentemente do deslocamento escalar (ou só deslocamento), que leva em consideração apenas o seu módulo.
Velocidade e aceleração vetorial
A velocidade vetorial diz respeito à variação de posição realizada por um corpo em um intervalo de tempo, levando em consideração a sua direção, o seu sentido e o seu módulo.
Já a aceleração vetorial diz respeito à variação de velocidade de um corpo em um período, também levando em consideração a sua direção, o seu sentido e o seu módulo.
Fórmulas da cinemática vetorial
→ Deslocamento vetorial
Na notação de vetores unitários, \(\vec{r}\) pode ser escrito como:
\(\vec{r}=x\hat{i}+y\hat{j}+z\hat{k}\)
- \(\vec{r}\) → vetor posição, que conecta um ponto de referência (em geral da origem de um sistema de coordenadas) à partícula, medido em metros [m] .
- \(x\hat{i}, y\hat{j}, z\hat{k}\) → componentes vetoriais do vetor posição.
- \(x, y, z\) → componentes escalares do vetor posição, medidas em metros [m] .
\(\vec{∆r}=\ \vec{r_f}+\vec{r_i}\)
- \(\vec{∆r}\) → vetor deslocamento da partícula, medido em metros [m] .
- \(\vec{r_f}\) → vetor posição no ponto final, medido em metros [m] .
- \(\vec{r_i}\) → vetor posição no ponto inicial, medido em metros [m] .
Usando a notação de vetores unitários, \(\vec{∆r}\) pode ser representado como:
\(∆\vec{r}=\left(x_f\hat{i}+y_f\hat{j}+z_f\hat{k}\right)-\left(x_i\hat{i}+y_i\hat{j}+z_i\hat{k}\right)\)
\(∆\vec{r}=\left(x_f-x_i\right)\hat{i}+\left(y_f-y_i\right)\hat{j}+(z_f-z_i)\hat{k}\)
- \(x_i,\ y_i,\ z_i\) → coordenadas que correspondem ao vetor posição \({\vec{r}}_i\), medidas em metros [m] .
- \(x_f,\ y_f,\ z_f\) → coordenadas que correspondem ao vetor posição \({\vec{r}}_f\), medidas em metros [m] .
Podemos escrever o vetor deslocamento em termos da variação (∆):
\(∆\vec{r}=∆x\hat{i}+∆y\hat{j}+∆z\hat{k}\)
- ∆x , ∆y e ∆z → variações entre os vetores posição \({\vec{r}}_f\) e \({\vec{r}}_i\), medidas em metros [m] .
→ Velocidade vetorial
A velocidade média pode ser calculada pela fórmula:
\(\vec{v}_{média}=\frac{{\vec{r}}_f-{\vec{r}}_i}{t_f-t_i}\)
- \(\vec{v}_{média}\) → vetor velocidade média, medido em metros por segundo \([m/s]\)
- \({\vec{r}}_f\) → vetor posição no ponto final, medido em metros [m] .
- \({\vec{r}}_i\) → vetor posição no inicial, medido em metros [m] .
- \(t_f\) → tempo final, medido em segundos [s] .
- \(t_i\) → tempo inicial, medido em segundos [s] .
Já a velocidade instantânea (ou simplesmente velocidade) pode ser calculada pela fórmula:
\(\vec{v}=v_x\hat{i}+v_y\hat{j}+v_z\hat{k}\)
- \(\vec{v} \) → velocidade instantânea, medida em metros por segundo [m/s] .
- \(v_x, v_y, v_z\) → componentes escalares de v , medidas em metros por segundo [m/s] .
Em que:
\(v_x=\frac{dx}{dt}\)
\(v_y=\frac{dy}{dt}\)
\(v_z=\frac{dz}{dt}\)
- \(v_x, v_y, v_z\) → componentes escalares de \(\vec{v}\), medidas em metros por segundo [m/s] .
- \(x,y,z\) → componenetes escalares de \( \vec{r}\), medidas em metros [m] .
- \(\frac{dx}{dt}\) → derivada da componente escalar de \(\vec{r}\), no eixo x, em relação ao tempo.
- \(\frac{dy}{dt}\) → derivada da componente escalar de \(\vec{r}\), no eixo y, em relação ao tempo.
- \(\frac{dz}{dt}\) → derivada da componente escalar de \(\vec{r}\), no eixo z, em relação ao tempo.
→ Aceleração vetorial
A aceleração média pode ser calculada pela fórmula:
\(\vec{a}_{média}=\frac{{\vec{v}}_f-{\vec{v}}_i}{t_f-t_i}\)
- \(\vec{v}_{média}\) → vetor aceleração média, medido em metros por segundo ao quadrado [m/s2] ;
- \({\vec{v}}_f \) → vetor velocidade no ponto final, medido em metros [m] .
- \({\vec{v}}_i\) → vetor velocidade no ponto inicial, medido em metros [m] .
- \(t_f\) → tempo final, medido em segundos [s] .
- \(t_i \) → tempo inicial, medido em segundos [s] .
Já a aceleração instantânea (ou simplesmente aceleração) pode ser calculada pela fórmula:
\(\vec{a}=a_x\hat{i}+a_y\hat{j}+a_z\hat{k}\)
- \(\vec{a} \) → aceleração instantânea, medida em metros por segundo [m/s] .
- \(a_x, a_y, a_z\) → componentes escalares de \(\vec{a}\), medidas em metros por segundo ao quadrado [m/s2] .
Em que:
\(a_x=\frac{{dv}_x}{dt}\)
\(a_y=\frac{{dv}_y}{dt}\)
\(a_z=\frac{dv_z}{dt}\)
- \(a_x, a_y, a_z\) → componentes escalares de \(\vec{a}\), medidas em metros por segundo ao quadrado [m/s2] .
- \(v_x, v_y, v_z\) → componentes escalares de \(\vec{v}\), medidas em metros por segundo [m/s] .
- \(\frac{{dv}_x}{dt} \) → derivada da componente escalar de \(\vec{v}\), no eixo x, em relação ao tempo.
- \(\frac{{dv}_y}{dt}\) → derivada da componente escalar de \(\vec{v}\), no eixo y, em relação ao tempo.
- \(\frac{dv_z}{dt}\) → derivada da componente escalar de \(\vec{v}\), no eixo z, em relação ao tempo.
Cálculo da cinemática vetorial
Na cinemática vetorial, calculamos deslocamento, velocidade e aceleração vetorial por meio das suas fórmulas. Abaixo selecionamos alguns exemplos de cálculos de deslocamento, velocidade e aceleração vetorial.
→ Cálculo do deslocamento vetorial
Veja, a seguir, um exemplo de cálculo de deslocamento vetorial, um dos cálculos da cinemática vetorial.
Exemplo:
Considere que uma partícula está inicialmente na posição \(\vec{r_i}=(-1,0\ m)\hat{i}+(4,0\ m)\hat{j}+(2,0)\hat{k}\) e depois passa para a posição \(\vec{r_f}=(2,0\ m)\hat{i}+(-1,0\ m)\hat{j}+(8,0)\hat{k}\). Qual é o deslocamento da partícula \(\Delta\vec{r}\) de \(\vec{r_i}\) para \(\vec{r_f}\)?
Resolução:
Calcularemos o deslocamento da partícula por meio da sua fórmula:
\(\Delta\vec{r}={\vec{r}}_f-{\vec{r}}_i\)
\(\Delta\vec{r}=\left[(2,0\ m)\hat{i}+(-1,0\ m)\hat{j}+(8,0)\hat{k}\right]-\left[(-1,0\ m)\hat{i}+(4,0\ m)\hat{j}+(2,0)\hat{k}\right]\)
\(\Delta\vec{r}=\left[2,0-\left(-1,0\right)\right]\hat{i}+\left[-1,0-4,0\right]\hat{j}+\left[8,0-2,0\right]\hat{k}\)
\(\Delta\vec{r}=(3,0\ m)\hat{i}+(-5,0\ m)\hat{j}+(6,0\ m)\hat{k}\)
→ Cálculo da velocidade vetorial
Veja, a seguir, um exemplo de cálculo da velocidade vetorial, um dos cálculos da cinemática vetorial.
Exemplo:
Determine a velocidade vmédia de uma partícula que teve um deslocamento de no instante t=7 s .
Resolução:
Calcularemos a velocidade média por meio da sua fórmula:
\(\vec{V}_{média}=\frac{\Delta\vec{r}}{\Delta t}\)
\(\vec{V}_{média}=\frac{(21\ m)\ \hat{i}+(-7\ m)\ \hat{j}\ (14\ m)\ \hat{k}}{7}\)
\(\vec{V}_{média}=(3\ m/s)\ \hat{i}=(-1\ m/s)\ \hat{j}+(2\ m/s)\ \hat{k}\)
→ Cálculo da aceleração vetorial
Veja, a seguir, um exemplo de cálculo da aceleração vetorial, um dos cálculos da cinemática vetorial.
Exemplo:
Determine a aceleração amédia de uma partícula que se desloca em uma velocidade de \((4\ m/s)\hat{i}+(-2\ m/s)\hat{j}+(9\ m/s)\hat{k} \) no instante t=2 s.
Resolução:
Calcularemos a aceleração média por meio da sua fórmula:
\(\vec{a}_{média}=\frac{\Delta \vec{v}}{\Delta t}\)
\(\vec{a}_{média}=\frac{(4\ m/s)\ \hat{i}+(-2\ m/s)\ \hat{j}+(9\ m/s)\ \hat{k}}{ 2}\)
\(\vec{a}_{média}=(2\ m/s^2)\ \hat{i}+(-1\ m/s^2)\ \hat{j}+(4,5\ m/s^2)\ \hat{k}\)
Veja também: Dicas importantes para resolver exercícios de cinemática
Composição de movimentos
Na composição de movimentos, fazemos uma análise de movimentos que ocorrem simultaneamente, mas em orientações diferentes (sentido e/ou direção diferentes), contudo, são observados como um único movimento. A análise da composição de movimentos faz-se necessária principalmente no estudo da cinemática vetorial, do lançamento oblíquo e da velocidade relativa, em que a direção e o sentido do movimento interferem no resultado.
A direção, o sentido e o módulo do vetor resultante (deslocamento, velocidade ou aceleração resultante) na composição de movimentos variam com a direção, o sentido e o ângulo entre os vetores.
→ Vetores com mesma direção e mesmo sentido
Quando temos uma situação em que os vetores (deslocamentos, velocidades ou acelerações) de um corpo possuem a mesma direção e o mesmo sentido, como na imagem à esquerda, o vetor resultante é dado pela somatória desses vetores, resultando na imagem à direita.
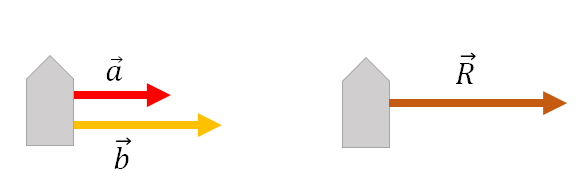
\(\vec{R}=\ \vec{a}+\vec{b}\)
Nesse caso, a direção e o sentido do vetor resultante são os mesmos dos vetores que o originaram.
→ Vetores em uma mesma direção, mas com sentidos opostos
Quando temos uma situação em que os vetores (deslocamentos, velocidades ou acelerações) de um corpo possuem a mesma direção, mas sentidos opostos, como na imagem à esquerda, o módulo do vetor resultante é calculado pela subtração dos vetores que o originaram, a sua direção é a mesma dos vetores que o originaram, e o seu sentido é o mesmo do vetor de maior valor numérico, resultando na imagem à direita.
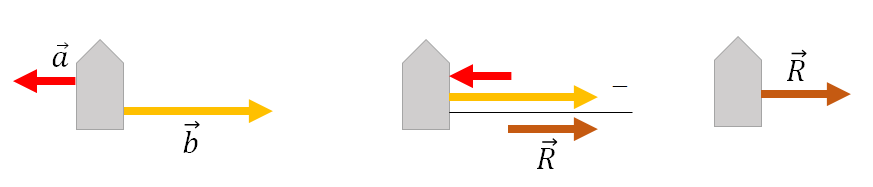
\(\vec{R}=\ \vec{a}-\vec{b}\)
→ Vetores perpendiculares
Quando temos uma situação em que os vetores (deslocamentos, velocidades ou acelerações) de um corpo são perpendiculares, ou seja, possuem sentidos e direções opostos e um ângulo de 90º entre eles, como na imagem à esquerda, o módulo do vetor resultante é calculado pelo teorema de Pitágoras e a sua direção e sentido são dados pela regra do paralelogramo (pontilhados), resultando na imagem à direita.
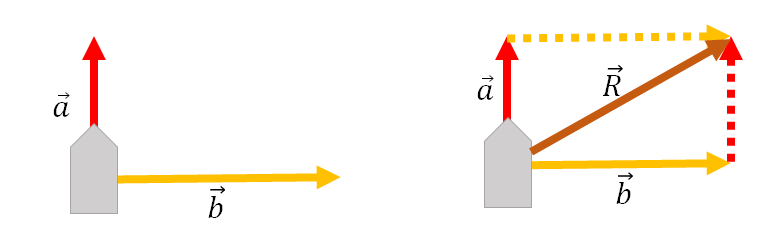
\(hipotenusa=\sqrt{{{cateto}_1}^2+{{cateto}_2}^2}\)
\(\vec{R}=\sqrt{a^2+b^2}\)
→ Vetores oblíquos
Quando temos uma situação em que os vetores (deslocamentos, velocidades ou acelerações) de um corpo são oblíquos, ou seja, possuem sentidos e direções opostos e ângulos diferentes de 0° , 90° , 180° , 270° ou 360° entre eles, como na imagem à esquerda, o módulo do vetor resultante é calculado pela lei dos cossenos e a sua direção e sentido são dados pela regra do paralelogramo (pontilhados), resultando na imagem à direita.
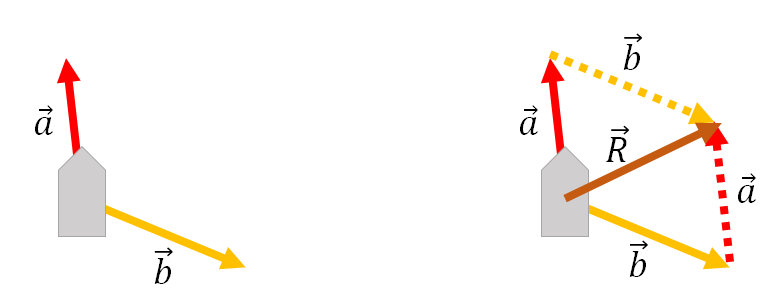
\(hipotenusa=\sqrt{{{cateto}_1}^2+{{cateto}_2}^2-2\cdot{cateto}_1\cdot{cateto}_2\cdot\cos{\theta}}\)
\(\vec{R}=\sqrt{a^2+b^2-2\cdot a\cdot b\cdot\cos{\theta}}\)
Diferenças entre cinemática vetorial e cinemática escalar
A cinemática vetorial e a cinemática escalar são ramos da cinemática que investigam o movimento dos corpos:
- Cinemática vetorial: nela investigamos o movimento dos corpos de maneira vetorial, ou seja, considerando a direção, o sentido e o módulo das grandezas vetoriais.
- Cinemática escalar: nela investigamos o movimento dos corpos, sem considerar a direção e o sentido das grandezas físicas vetoriais.
Exercícios resolvidos sobre cinemática vetorial
Questão 1
(Fatec) Um automóvel percorre 6,0 km para o norte e, em seguida, 8,0 km para o leste. A intensidade do vetor posição, em relação ao ponto de partida, é:
A) 10 km
B) 14 km
C) 2,0 km
D) 12 km
E) 8,0 km
Resolução:
Alternativa A
Nesse caso temos uma composição de movimentos, então calcularemos a intensidade do vetor posição por meio do teorema de Pitágoras:
\({hipotenusa}^2={{cateto}_1}^2+{{cateto}_2}^2\)
\({hipotenusa}^2=6^2+8^2\)
\({hipotenusa}^2=36+64\)
\({hipotenusa}^2=100\)
\(hipotenusa=\sqrt{100}\)
\(hipotenusa=10\ km\)
Questão 2
(PUC) Se a velocidade vetorial de um ponto material é constante e não nula, sua trajetória:
A) é uma parábola.
B) pode ser retilínea, mas não necessariamente.
C) deve ser retilínea.
D) é uma circunferência.
E) pode ser uma curva qualquer.
Resolução:
Alternativa C
Considerando a velocidade vetorial constante e não nula, a sua trajetória será retilínea, já que a velocidade vetorial terá a mesma direção, o mesmo sentido e o mesmo módulo em todos os pontos.

